I’ve managed to fry three rotary encoders on the left motor now. The first one was when I discovered the issue. The second one was when I switched the left and right encoders to try and see if the issue was specific the encoder or something else. And the third one was a spare 900CPR encoder I plugged in just to see if it would work.
When I write computer code, I’m pretty cavalier about testing it. If I get an error, I just go back to the code and tweak it. The computer typically doesn’t go up in smoke if I forget a parenthesis or colon.
On the robot lawn mower, however, there are consequences for this kind risk taking. Installing a new encoder in a scenario where I’ve just watched one get fried is, well, pretty stupid. The results are predictable.
Because they’re not particularly cheap, I decided it would be best to sit down and figure out exactly why the encoders keep breaking. To summarize the symptoms:
- Only the encoder on the left motor breaks. The encoder on the right motor works fine.
- After installing a new encoder on the left motor, it will work fine for a while, but eventually stops working.
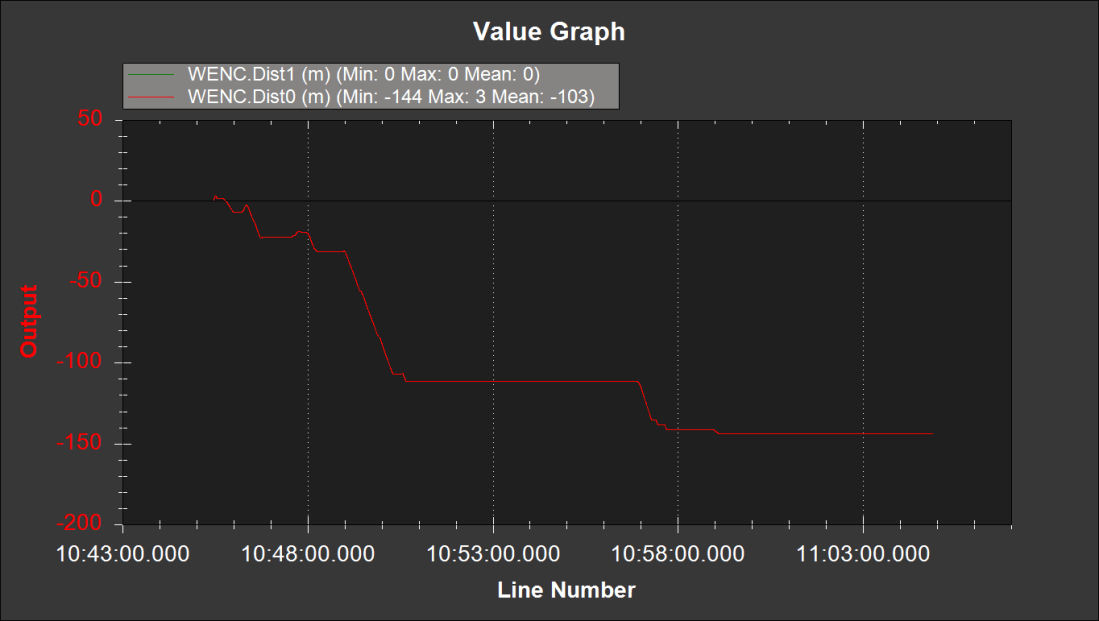
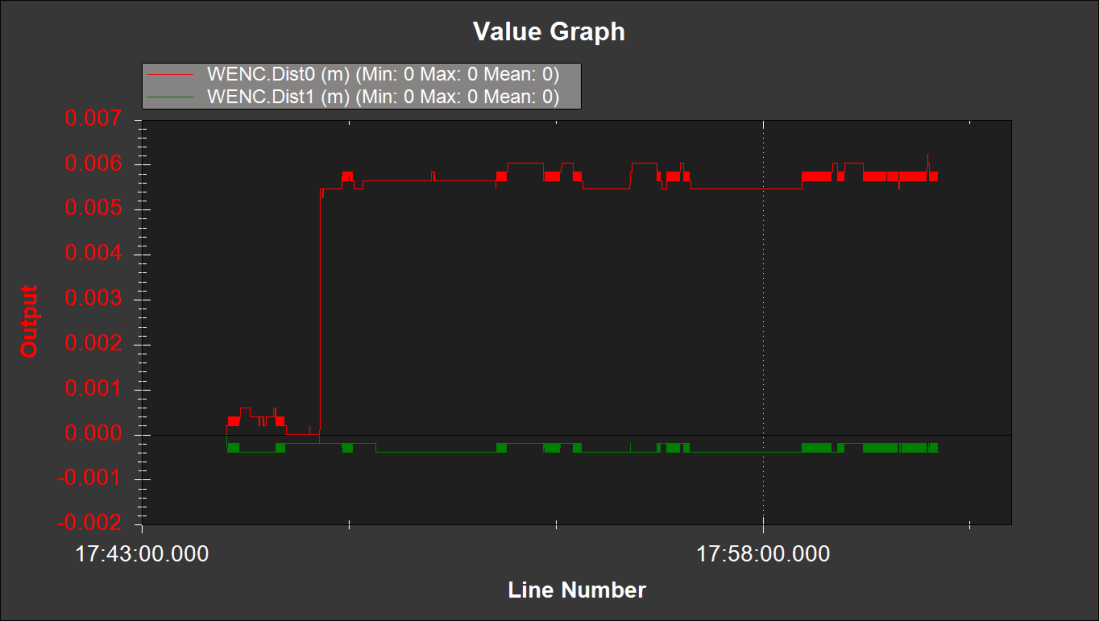
- When an encoder fails, it will oscillate around the zero point by a few counts. It still outputs data, it’s just really crappy data.
After installing the encoders and building the drive motor assemblies, I bench tested the encoders. I wanted to make sure I caught any issues before I installed them on the mower. They worked great at the time, but I only applied 12V to the motors. They receive 24V the way they’re wired in the robot lawn mower.
So my initial hypothesis was that perhaps the current sent through the motor wires was inducing current in the adjacent encoder wires. Maybe at 12V it’s not enough to matter, but with 24V, it causes an issue. The maximum current rating for the E5 encoders I’m using is 85mA, not much. But if this were the case, you would think the same issue would present itself on the right motor. They’re wired identically, but the right motor works just fine. So that can’t be the problem.
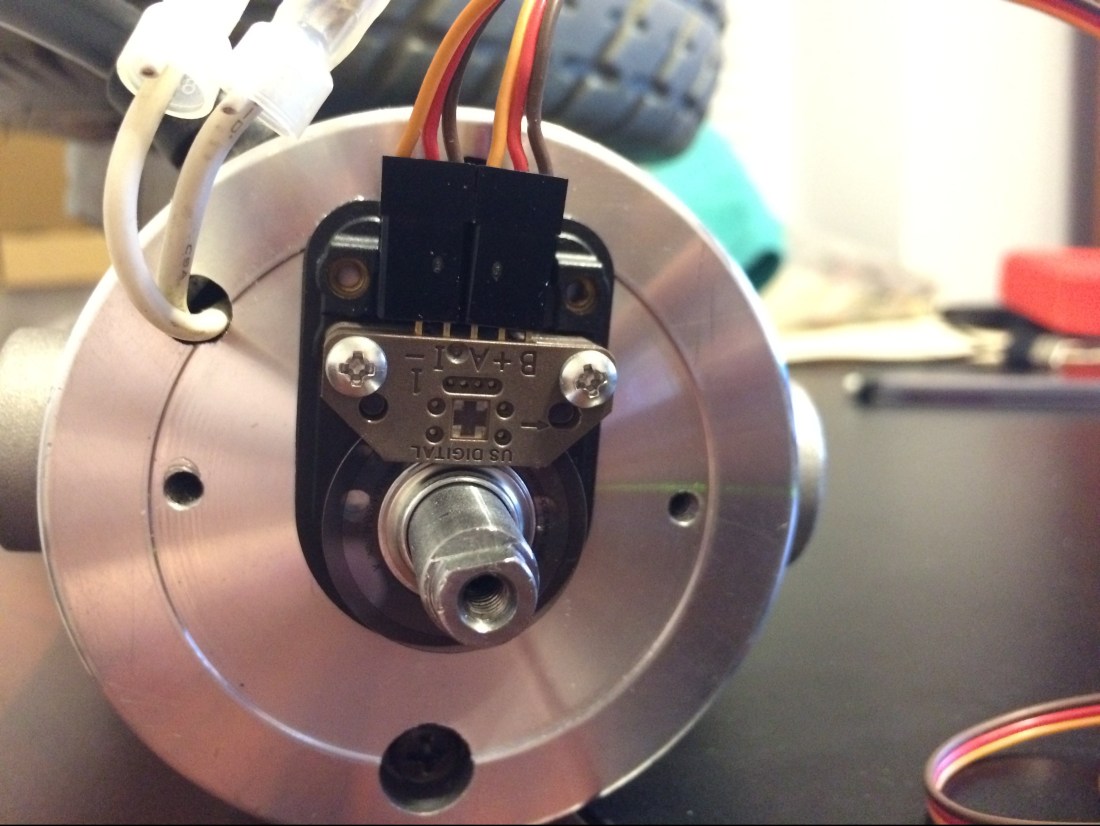
After tracing my wire runs and verifying everything worked, I was at a loss as to what was causing the issue. So I took apart the motor to see if something weird was going on inside.

Well, a nicked signal wire could definitely cause an issue.
The two brass extrusions on the left and right side of the picture are for seating the motor brushes. With all the exposed, energized metal in this area it wouldn’t surprise me if the wire made contact with something and fried the encoder.
I’m guessing I pinched the wire when I installed the cap. It’s pretty tight in there and you kind of have to hammer it into place. You’d have no idea something got pinched until, well, the encoders stopped working.
After replacing the encoder wires and rebuilding the motor, I used the 900CPR encoder to make sure things were working. So far so good. Hopefully I’m done buying rotary encoders for a while.