The rotary encoders arrived today. To familiarize myself with them, I decided to use them to try and determine the gear ratio of my wheelchair gearmotors. The idea is that I can rotate the tire a fixed number of times, read the encoder output and then do some math to figure the gear ratio. I’ll need this number for using the wheel encoders with the Ardupilot software.
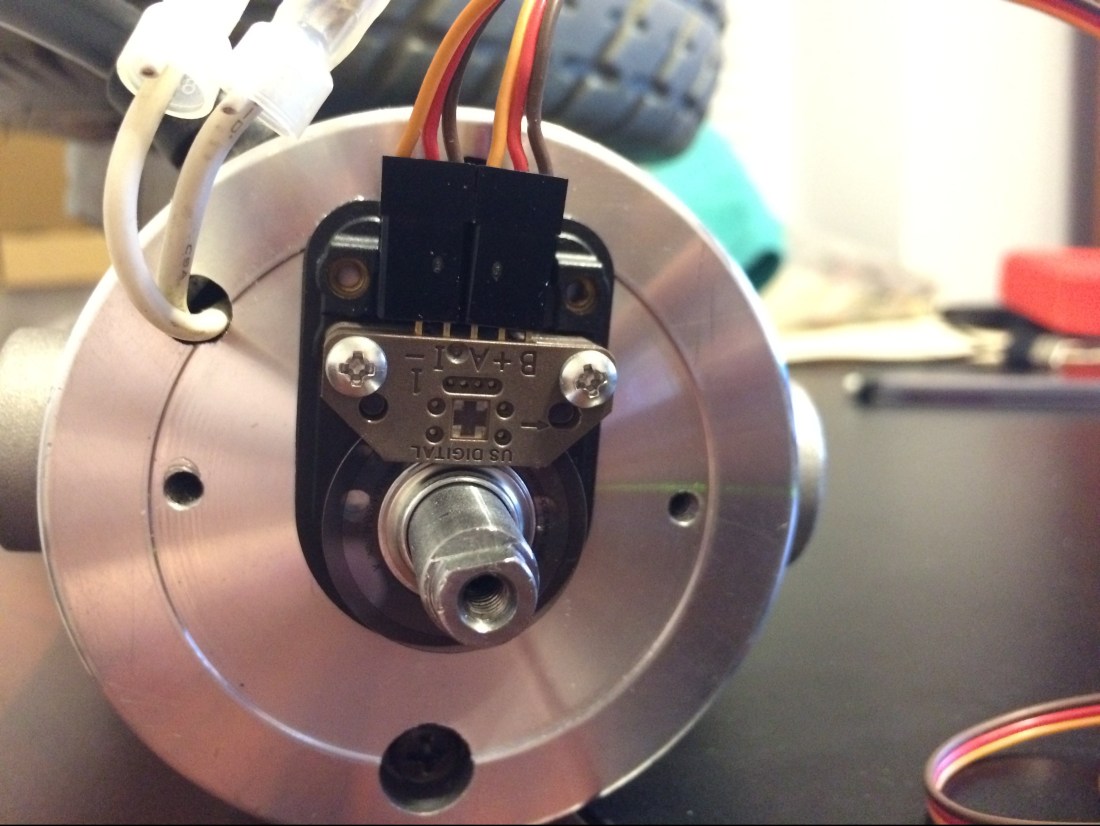
Installing this guy was very easy. Peel the cover strip off the adhesive on the back of the encoder and use the conical centering tool to align the base to the shaft. Press it down so it sticks, and then screw everything else into place. Very nice.
The more difficult part is reading the encoder output. To do this I used my old Arduino Uno and did some googling for a sketch that looked close to what I needed (remember I’m a mechanical engineer, not a computer guru). No need to re-invent the wheel, right?
And lo and behold, I found this webpage. And the sketch was pretty much plug and play, short of playing with the baud rates. Not bad for 15 minutes of work!
The encoder I purchased is rated for 900 pulses per revolution. I could have tweaked the sketch so that it measured actual rotations, but I figured I’d just do the math outside of the sketch.

So I taped a pencil to the wheel, hooked it up to a battery and started measuring tire revolutions. After 152 revolutions (measured by aligning the pencil with the motor), the Arduino sketch read 17401196. Dividing that large number by 152 and also by 3600 (it’s a quadrature encoder, so 900 PPR times 4) should give the gear ratio.
The magic number appears to be 31.8. I’m told that gearbox manufacturers like to use strange ratios so that a tooth on one gear doesn’t always contact the same tooth on another gear every revolution. This helps the teeth wear evenly. That’s the only explanation I can think of for this funky number.
I might hook the other encoder up to the output shaft and to get some additional resolution…
