I have decided that I need to refine the wheelchair robot’s ability to navigate accurately and robustly before I shell out a few thousand dollars to build the robot lawn mower. The goal here is to have the wheelchair robot “mow” my lawn before I invest in the actual robot lawn mower. If the wheelchair robot can’t do it, the robot lawn mower doesn’t have much of a chance, either.
So I’ve spent most of my time testing the wheelchair robot and the RTK GPS system. I have been typically placing the base on my community mailbox because it is geostationary, has a large metallic surface to prevent multipath, and a decent view of the sky.

Surprisingly, I was able to get several RTK Fixes partially underneath my large maple tree in my front lawn. While in RTK Fixed mode I had the rover running a mission with 10 waypoints in a 3m diameter circle. I cranked down the waypoint radius to 0.3m to try and make sure the robot was accurately traveling to each waypoint.

The map above shows some calculated positions prior to obtaining the RTK fix and after the RTK fix is lost.

There is some offset between the satellite imagery and the actual location on the ground, which makes things a little confusing, especially when planning a mission close to many obstacles. I almost ran into my neighbor’s basketball goal after I lost my RTK fix.
To give you a better idea of the quality of the fix, here is the latitude reported by the GPS receivers and the blended location as calculated by the EKF:
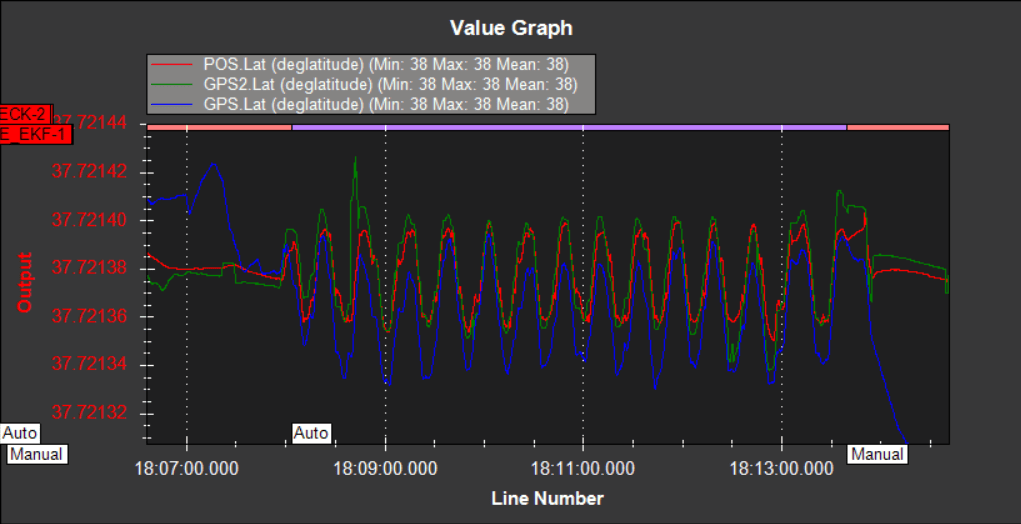
The RTK fix in the graph above is first obtained at 18:06:15 and is maintained intermittently until about 18:14:12. The reported HDOP for both GPS receivers was close to 0.7, but despite this, I am impressed that by default, the EKF is giving much more weight to the RTK solution. You can see this in the graph: the red and green lines are much closer than the blue line.
The oscillations in the graph above are from the circular mission I was running. It looks like I had a pretty good RTK fix from about 6:09PM to about 6:13PM. This was about 11 laps about the circle.
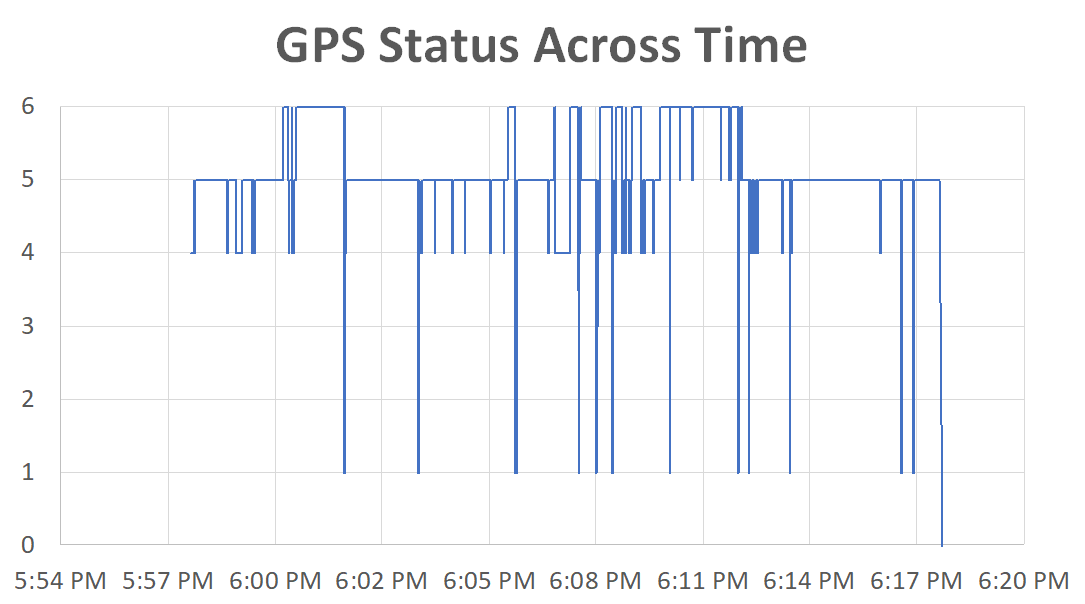
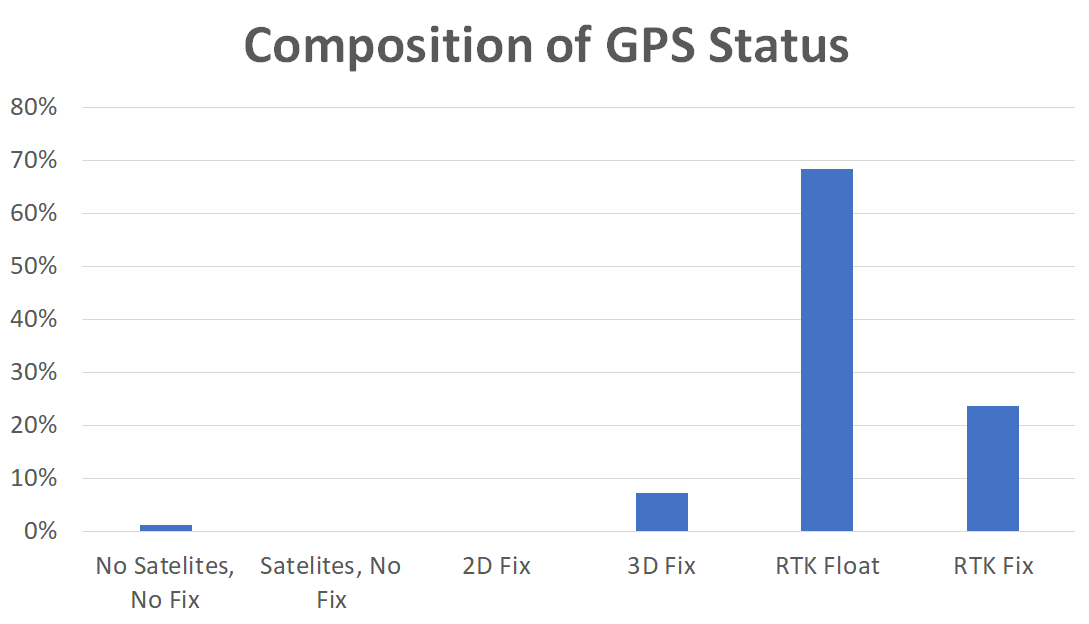
Some additional information about the fix status:
I don’t want to oversell these results, because they weren’t typical of the entire afternoon. I spent a good chunk of time running the wheelchair robot in Acro mode tuning the throttle and steering parameters, and I wasn’t able to get an RTK fix throughout that time. It’s very much a patience thing.
