Weather in Kansas during February can be pretty awful, and this year is no exception. We’ve had a lot of snow lately, and the temperatures have been 30’s or lower on the days that I could take the robot wheelchair out for some more testing.
A few months ago I listed some goals I had for the robot mower prototype. I’ve made progress toward some, and overall I feel pretty good about where I’m at for now. Here’s an update of the progress.
Prototype Robot Mower Design
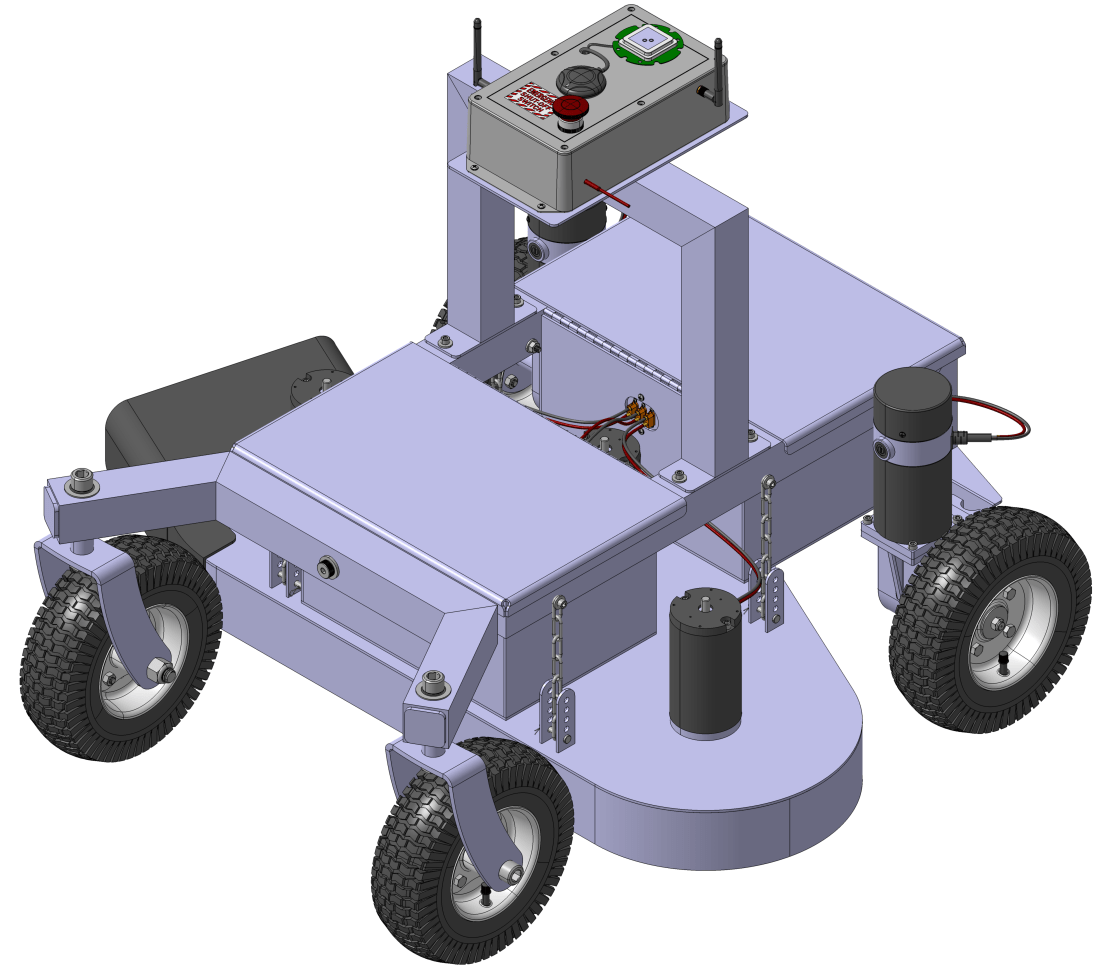
The robot mower design is about 70% finished. I am working on getting the wires modeled in my CAD software currently, and this has been time consuming but I know it will pay off down the road.
I need to revisit how I’m attaching the mower blade to the motor shaft. I had considered using some cheap QD pulley bushings because they have a nice keyway in them that matches the motor shaft and holes that would mount easily to the blade, but I’m not sure this is the best way to do things.
I wish I could find these bushings without the split in them. I’m not sure they make them that way. The split makes me worry that it will be difficult to get good clamping force around the shaft. Also, nothing but a set screw keeps the key and bushing clamped up against the shaft. Because the motor is mounted vertically, all heck could break loose if the set screw loosens up. The bushing could conceivably slide off the shaft while spinning at stupid high RPMs. Not good.
At any rate, CAD work is about the only thing I can work on when there’s 4 inches of snow on the ground outside.
Sourcing Weldments
I’ve been very disappointed with some of the local weld shops I’ve sent drawings to for quote. I live in an industrial town and there are lots of mom and pop shops that I figured would jump at the chance to pick up a small job like mine. I’ve received 5 no bid quotes so far, and haven’t heard back from 3 other shops. Very frustrating.
I tried one of those online weld shops and they quoted the mower deck at $4,500. That’s definitely not in the budget, and I know this weldment is worth no more than several hundred dollars. If you can weld 0.125in thick aluminum sheet metal, leave a comment and I’ll send you over some drawings and maybe we can make a deal.
Purchased Parts
I’ve purchased one of the E30-400 motors to evaluate, but haven’t had time to play with it yet. It’s a lot smaller than I expected. I hope to do a write up on it here in the next few weeks.
I also purchased some high current automotive relays for switching power to the deck motors. The wheelchair design has all of the current running through a 20A switch which in hindsight is a really crappy design. It works for the wheel chair, but to power three 50A motors requires a better solution.
RTK GPS Integration
The Ardusimple RTK GPS boards are working far better than I expected. There’s really very little integration left to do. I will try to take the wheelchair robot out to a large parking lot here when the weather warms up to get a better idea of it’s performance in a decent GPS environment. I’m very excited to see how it does without a ton of trees and buildings around. Its performance so far has been pretty awesome.
Rebuilding the Wheel Chair Robot
I haven’t rebuilt the wheel chair robot yet in light of our crash a few weeks ago. This is also on my to do list. Hopefully we’ll have a chance to do that this next weekend. It’s really hard to get motivated work on a lawn mower robot when it’s 20 degrees outside and there’s snow on the ground.
New Goals
Because RTK GPS integration isn’t going to take nearly as long as I anticipated, I need to spend more effort on getting the robot constructed, under budget and by May if possible. I may try some weld shops in surrounding towns, or possibly the old Craigslist method where I just post drawings and see who replies.
