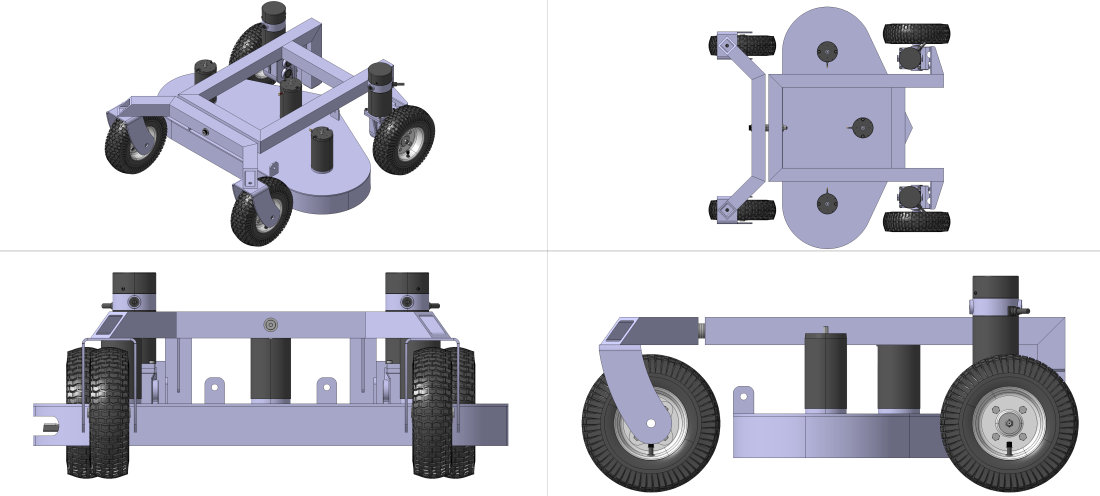
The nice thing about CAD software is you can see how different ideas play out before you spend a fortune to discover they don’t work. The past month or so I’ve been drawing up robot mower designs with little luck. The model above is the only one I feel even moderately good about.
Most of the concepts I’ve put together so far feature a sheet metal chassis shaped around my batteries and motors. The upside with these previous designs is that it allows for the smallest vehicle footprint. The downside is that they involve a lot of welding and waterjet parts, and it’s difficult to come up with a simple mechanism to adjust the deck height because the motors mount directly to the chassis.
This new concept has the mower deck hanging beneath the robot frame. Separating the deck from the robot frame allows both to be simplified greatly. To adjust the deck height I plan on putting a few turnbuckles between the robot frame and the mower deck. An added bonus is that I can disassemble it and throw the robot in the trunk of my small Hyundai sedan for field testing.
One potential downside I anticipate with the design above is that it will be top heavy. The four batteries have to sit on top of the robot frame. We can box them in and secure the to the frame, but I’m not sure what the vehicle center of gravity will look. Guess we’ll have to do some more modeling to find out.
