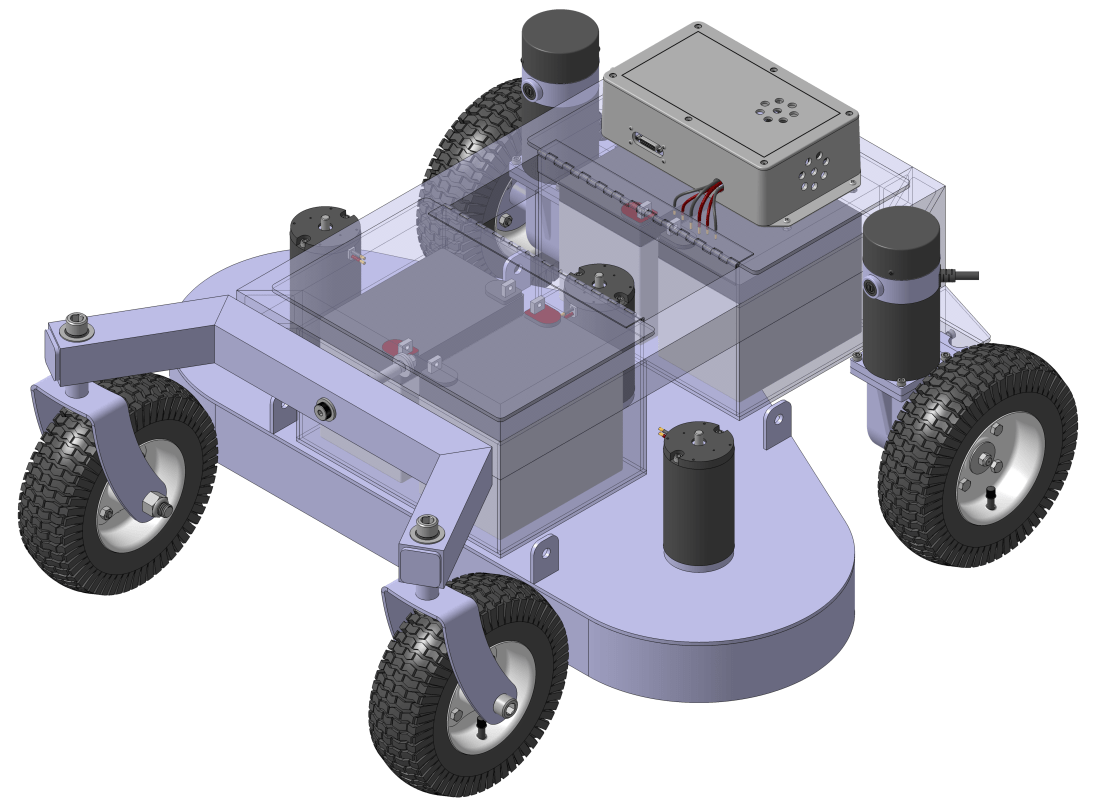
The autonomous lawn mower design is coming along nicely. It turns out that the batteries fit nicely below the robot frame. I only had to raise it by 1.5in to give adequate clearance for the battery terminals. This keeps the center of gravity low, and makes for an all around good looking robot in my opinion.
I have an RTK GPS module arriving in December (more on that later), and I want to get the lawn mower design as mature as I can before I need to start investing my time testing that module with the wheel chair.
My list of open items on the design as of this evening:
- Latches for the battery compartments. Maybe I don’t need them, but it would be nice to have some way to hold the doors closed. Maybe just some screws would work.
- Control enclosure location. It needs to be far enough away from the deck motors to avoid the flux storm. But mounted in such a way that it doesn’t adversely affect vehicle performance or look goofy.
- Deck height adjustment mechanism. The robot needs to have a way to simply and quickly adjust the deck height as you would on a typical lawn mower.
- Safety shutoff and control system for deck motors. I think these should be powered by a separate set of relays so they can be independently turned off from the rest of the rover. They will still be wired into the master safety shutoff switch.
- RTK GPS antenna mount location. Wherever the control enclosure box gets placed, it will need to have enough real estate on it for the GPS antenna.
- General wiring. All the motors, the enclosures, everything. This will take a lot of time but as we saw earlier was very much worth it.
- Mower deck discharge chute. The mower needs a plastic chute where the grass clippings discharge. It’ll also need the hardware that attaches it to the deck.

The autonomous lawn mower measures 37.5in long X 36in wide X 17.5in tall currently. Not bad considering our grass cutting width is 35.5in!
