One of my goals for this winter is to design the prototype autonomous lawn mower. The rover V2 is coming along nicely, and while I have a few systems left to work on, the big ones are already implemented and working. So I spent some time this week thinking about the thing that makes a mower a mower: the cutting blade.

A few months ago I purchased a small electric push mower off Craigslist. It had a DC motor and a 12in cutting blade that I disassembled for the mower project. I figured the “cutting grass” problem is essentially already solved and that there’s no sense in reinventing the wheel. But now that I’ve done some thinking, I’m not sure this problem is as simple as it seems.
Choosing the Right Sized Blade
Eventually I will attempt to integrate an RTK GPS system on the mower. Depending on who you ask, you’ll find that RTK GPS systems are accurate to about +/-1in. For the rest of this post I will be talking in terms of accuracy relative to the base receiver. Absolute positioning with any degree of accuracy is another can of worms altogether.
What +/-1in means is that at any given time, the mower could be 1in to the right, or 1in to the left of its reported position. Let’s say it’s 1in to the right while it’s mowing a row in your lawn. That +/-1in means when it doubles back for the next pass, it could be off by 1in in the other direction. Basically, +/-1in means there could be up to a 2in gap between passes.
So we will need to overlap passes by some amount. You would normally do this anyway if you were mowing your lawn manually. I overlap passes with my push mower by about 4in when I’m mowing my lawn to make sure I don’t miss anything, and we’ll want the robot mower to do this too to maintain a quality lawn cut. So we’ll need at least 6in of overlap: 2in to account for RTK GPS drift and 4in to account for normal overlap.
The issue I’m trying to highlight here is that the narrower your mower, the more critical it will be that it is positioned accurately. You can’t tolerate much drift because you’ll start missing passes if you’re mislocated by any amount. And to overlap such that you don’t miss passes requires overlap equal to 50% of your blade width, which is very inefficient.
This is why (in my opinion) RTK GPS works pretty seamlessly on big agricultural equipment. Those tractors and combines are a whole order of magnitude larger than our mower. They’re also out in big open fields with great GPS reception, but that’s a rabbit hole for another post.
So Pick the Biggest Blade Size, right?
Well, sort of. If you do much searching, you’ll find that the biggest blade you can get your hands on is about 21in. There’s a good reason for this: mowers cut best when the blade rotates at near-ballistic speeds, and if you make a blade much larger than 21in and then rotate it at 3600RPM, anything it hits turns into a piece of shrapnel. Not to mention what could happen if the blade itself shatters. Go look up some lawn mowing accident videos to see what I mean.
In my reading, I found that our friends at the American National Standards Institute (ANSI B71.1-1990) did some testing and recommended manufacturers keep the blade tip speed below 19,000ft/min, or 216mph. That’s linear velocity, not angular velocity. Remember that angular velocity is equal to linear velocity divided by the radius through which it rotates.
So How Fast Should We Spin the Blade?
So knowing that we want a big blade size and that we want to achieve a blade tip speed of just shy of 19,000ft/min, we can calculate the required angular velocity.

Knowing the angular velocity, we can now calculate the required power if we know the torque the mower blade will experience spinning through thick grass. Unfortunately, that’s a very difficult figure to arrive at. So instead of doing some convoluted math to estimate the torque to cut through grass, we’ll just take the gross torque ratings listed by the folks out at Briggs and Stratton, as their mowers generally cut through grass with no problem.
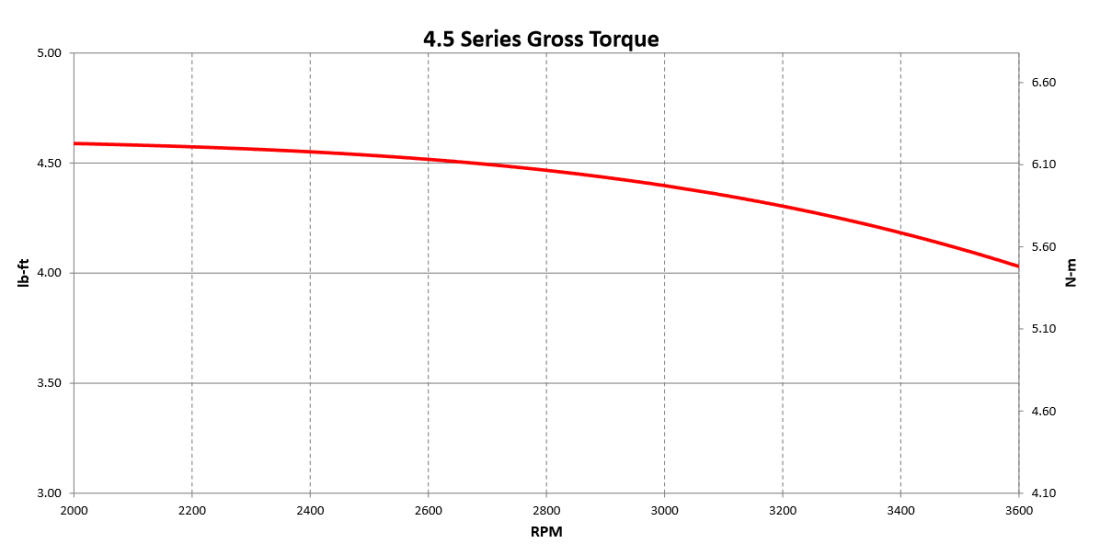
This engine is one of their lower end models. Briggs and Stratton advertises gross torque at 2600RPM, so for this engine it would be 4.5ft-lbf of torque. If we take 5ft-lbf of torque as the required torque to cut through grass, we can estimate the power we’ll need for an angular velocity of 3450RPM.

Does the Craigslist Motor Cut It?
Electric motors aren’t like gasoline engines. Their torque to RPM curves are much simpler. With no load attached to the armature, the motor will spin very fast while outputting very little torque. If you apply a small load to the motor, the angular velocity will decrease slightly and torque will increase slightly. If you keep doing that until the motor stops turning, you’ll arrive at the stall torque. This is the maximum torque the motor can output.
So electric motor torque to RPM curves are linear. To draw them, you only need three pieces of information: the angular velocity and torque at a given point on the curve and the no load angular velocity. Using that information, you can draw a line for the torque curve.

The table here indicates the no load speed is 4300RPM and gives an operating point of 0.96ft-lbf (1.3N-m) of torque at 3700RPM. From this information you can find the stall torque and the maximum power the motor can output.

The manufacturer says that the rated power for the motor is 500W, but from my calculations I’m not sure that’s true. However, I am very surprised that the calculated power is this low. It’s very possible I have no clue what I’m doing here with these calculations. If that is the case, please call me out on it.
A motor that gets even close to the power levels we need would have to be a 2500W motor. We have a 24V power system, and we need the motor to spin at 3600RPM minimum. Doing a brief web search for those terms doesn’t come up with many promising alternatives. I’m not sure motors with those parameters are practical or even exist, at least in the PMDC variety.
So What Have We Learned?
I can think of a few things:
- If RTK GPS is our positioning technology, we’re going to want to make the mower as wide as we reasonably can.
- To keep our mower safe, the blade tip speed needs to be no faster than 19,000ft/min.
- Mower blades don’t come much larger than 21in long, so if we want a deck bigger than that we’ll be adding complexity to our design.
- We’re going to need a boat load of power to spin that 21in blade at power levels generated by gasoline engines.
- A permanent magnet DC motor may not be the way to go given these constraints.
I hope these musings about the mower make sense. I am always open to opinions and criticism about the evidence above, and what conclusions should be drawn from them.
Brushless DC motors, on the other hand…

3 thoughts on “Mower Musings”