As I mentioned previously, I need to find a motor manufacturer that posts more than a picture of their product on an electric bike. I need torque curves and CAD models. I am surprised at how few of these manufacturers exist, or at least have websites that I can find. Maybe I just don’t know how to search for them.
Part of the problem is that I’m looking for a motor that has power output on the level of a small riding lawn mower. Finding smaller BLDC motors has been pretty easy, but finding something that operates efficiently at lawn mower speeds while still outputting decent torque has been challenging. Also, it has to cost no more than a few hundred dollars, because I’m cheap and I need some money left over for an RTK GPS module down the road.
So I’m starting out from behind the 8-ball to begin with. I wasn’t sure such a motor existed until I found the folks at Golden Motor. These guys are a little sketchy, and they need to hire a web designer from the 21st century. But they appear to have a wide selection of motors in some pretty epic sizes, with fairly comprehensive performance data, too.
But before we go looking at individual motors, let’s review our requirements.
Motor Requirements
At the moment I am leaning toward a single mower blade design. I’ve learned the hard way that complexity is not your friend, and simple designs are generally more robust.
To maximize the deck width, I am considering a 30in long blade. A 30in blade needs to rotate no faster than 2400RPM to be safe. Riding mowers with one single 30in cutting blade are equipped with engines that output about 10ft-lbf of torque.
The plan currently is to have four 12V 35Ah sealed lead acid batteries wired in series to power the motor. So it must be rated for 48V.
Evaluating the BLDC-108 Motor
This is a 1500W motor that Golden Motor makes. It’s also the only one that doesn’t have a nice chart for all the relevant performance parameters, but they did give an excel spreadsheet with several data points. I graphed the data and here’s what it looks like.
The speed and power versus torque curves for the BLDC-108 motor. The blue curve is speed and the red curve is power. Excel only lets you plot two separate y-axes, which is very frustrating. Get it together Microsoft, this is 2018!
The efficiency of the motor is greater than 85% between 1 to 3.5ft-lbf torque with a maximum efficiency of 88% at 3325RPM and 2.6ft-lbf torque. The motor consumes about 40A of current at the torque shown on the chart.
To achieve the maximum safe blade rotation speed of 2400RPM, we need to use two pulleys of different diameters on the motor shaft and the blade spindle. Taking the maximum speed the motor operates at of 4072RPM and dividing it by 2400RPM gives us the pulley ratio we’ll need, which in this case is 1.7.
If we use the motor with a pulley ratio of 1.7, we could obtain 5.9ft-lbf of torque at 1800RPM. Reducing the speed increases the torque.
Some thoughts about this motor:
The torque is a little on the low side, even after you factor in the pulley ratio. I suppose you could go with a higher pulley ratio, but that reduces your speed even further, which I’m told affects the quality of your grass cut.
I like that the current draw is only 40A. With four 35Ah batteries, you could in theory get 3.5 hours of operating time, neglecting current consumption from other electronics and motors. I like that number.
The picture on the website is nothing like the CAD model you can download. So that’s something I’ll need to investigate if this is the motor I choose.
The motor is priced at $142 with $60 for shipping. BLDC motors require a separate motor controller, so that will be another $95 with $30 for shipping. So a system built around this motor will cost a total of $327. Not horrible. I wish I knew why the shipping was so high…
I’ve had some more time to think about our mower blade and the system that will be required to power it. To summarize what we discovered last time:
A 21in blade is the maximum size we can use.
A larger mower will be more efficient in general because a smaller portion of the mower width will be used to overlap the previous pass.
Typical brushed DC motors are probably not a great way to power the blades.
Two Cutting Blades or One?
I think I need to retract statement (1) above. It turns out there are larger blades out there, the only caveat is that they have to be rotated at a slower angular velocity to maintain a blade tip speed of less than 19,000ft/min.
Using the math I outlined previously, a 30in blade needs to be rotated at just over 2,400RPM to achieve a blade tip speed of 19,000ft/min. This turns out to be a good thing too, because this slower speed can be achieved by using different sized pulleys on the drive motor and spindle, which will allow us to trade higher RPMs for more torque, which will be needed with a larger blade.
I was really hoping to avoid a mower with two blades for a few reasons:
Complexity: two blades means two spindles, some idler pulleys, and more moving parts.
Blade interference: the travel paths of the two blades need to overlap a little so you don’t miss any grass, forcing us to make sure the blades don’t get out of sync and crash into each other
Vibration: I imagine two blades will result in more vibration, but this is speculation.
Real estate: the mower deck needs to also house (4) 12V 35Ah batteries and a bunch of control boxes. Two spindles and a large belt with idler pulleys eat this space up really quick.
Robustness: More parts means more opportunities for failure.
Cost: More parts means more cost.
So seeing as we can use one blade while still achieving a cut width of about 30in, I think this is the preferable solution. There are mowers out there that use 30in blades, but the torque required for such a blade size is pretty high. This mower is equipped with a Briggs and Stratton engine that outputs 10.5ft-lbf of torque at 2,400RPM.
Keep in mind that’s engine torque output, not torque at the rotating blade, but that still means our electric motor needs to output at least 5.25ft-lbf at 4,800 RPM (see the pulley ratio math below). I’m guessing that will be a difficult number to achieve.
Motor Alternatives
Regarding (3) above, I think a brushless DC motor may be the way to go. I found this motor on an electric scooter parts store which seems promising, but I need to see a torque to RPM curve to be sure. Coincidentally, that motor is rated for 4800RPM, which results in a pulley ratio of about 2:1. Not bad.
On the down side though, most of those motors are designed to be used with sprockets and chain, which isn’t a great idea for mowers. There’s a reason mowers use pulleys and V belts. I suspect it is because they allow for a more fluid transmission of torque to the blade and also slippage if the blade hits something rigid, resulting in less strain on the drive motor or engine.
This will mean I’ll probably need to fabricate a custom drive pulley to adapt to the motor shaft and accommodate the V belt required by the blade spindle.
What Do The Other Engineers Think?
The Ryobi RY48110 electric riding mower. I wonder what’s inside?
This is the 21st century. Has anybody designed an electric mower with similar parameters to the ones we’re looking at here? Turns out the answer is yes. The specs for the Ryobi RY48110 riding mower:
Looks like they’re using a few 12V 25Ah lead acid batteries for power.
They use two BLDC motors directly connected to the cutting blade.
Deck width is 38in which would imply a ~19in blade length.
Funny story, if you pull up the parts list and google their replacement motor part, you come up with this motor rated at 48V, 32A, 1800W, 4500RPM. So we’re at least in the neighborhood.
A few comments about this mower:
They’re using this motor to drive a ~19in blade. We’re looking at using a motor that is actually rated at 1600W to drive a blade that’s more than 50% larger. Not good.
Direct drive is interesting, it’s definitely simpler. I would be interested to see what kind of connection hardware they use.
A 19in blade implies a maximum blade tip speed of 3800RPM. The motor is rated for 4500RPM. I wonder if the mass of the blade results in a equilibrium rotation speed of about 3800RPM. If not, the mower isn’t in compliance with ANSI B71.1-1990.
How do the two motors stay in sync? I wonder if the blade paths overlap or if there is some kind of chain or belt between them to maintain their angular offset.
Being BLDC motors, I also wonder what the controller looks like. I imagine it shoots for a fixed rotation speed. I would be interested to know what that rotation speed is.
The Cadillac version of this electric riding mower only offers 100Ah of charge at 48V. That’s only 4.8kWh of energy. Our system with four 12V 35Ah batteries can store up to 6.72kWh of energy. This is interesting because not only does the riding mower need to cut grass, but it also has a possible 250lb person it’s driving around too. So I think we’re on the right track as far as power requirements go.
In Summary…
I need to get some torque speed curves for these motors. Otherwise we’re just guessing about motor capability here.
I think our power system is appropriately sized based on the RY48110 specifications.
Torque output is still the big unknown here. The RY48110 gives us a baseline to work from though.
It looks like BLDC motors are going to be the device that powers our blade, seeing as the folks at Ryobi arrived at the same conclusion we did.
One of my goals for this winter is to design the prototype autonomous lawn mower. The rover V2 is coming along nicely, and while I have a few systems left to work on, the big ones are already implemented and working. So I spent some time this week thinking about the thing that makes a mower a mower: the cutting blade.
The motor from Craigslist. The label says “24VDC 500W 4300RPM”.
A few months ago I purchased a small electric push mower off Craigslist. It had a DC motor and a 12in cutting blade that I disassembled for the mower project. I figured the “cutting grass” problem is essentially already solved and that there’s no sense in reinventing the wheel. But now that I’ve done some thinking, I’m not sure this problem is as simple as it seems.
Choosing the Right Sized Blade
Eventually I will attempt to integrate an RTK GPS system on the mower. Depending on who you ask, you’ll find that RTK GPS systems are accurate to about +/-1in. For the rest of this post I will be talking in terms of accuracy relative to the base receiver. Absolute positioning with any degree of accuracy is another can of worms altogether.
What +/-1in means is that at any given time, the mower could be 1in to the right, or 1in to the left of its reported position. Let’s say it’s 1in to the right while it’s mowing a row in your lawn. That +/-1in means when it doubles back for the next pass, it could be off by 1in in the other direction. Basically, +/-1in means there could be up to a 2in gap between passes.
So we will need to overlap passes by some amount. You would normally do this anyway if you were mowing your lawn manually. I overlap passes with my push mower by about 4in when I’m mowing my lawn to make sure I don’t miss anything, and we’ll want the robot mower to do this too to maintain a quality lawn cut. So we’ll need at least 6in of overlap: 2in to account for RTK GPS drift and 4in to account for normal overlap.
The issue I’m trying to highlight here is that the narrower your mower, the more critical it will be that it is positioned accurately. You can’t tolerate much drift because you’ll start missing passes if you’re mislocated by any amount. And to overlap such that you don’t miss passes requires overlap equal to 50% of your blade width, which is very inefficient.
This is why (in my opinion) RTK GPS works pretty seamlessly on big agricultural equipment. Those tractors and combines are a whole order of magnitude larger than our mower. They’re also out in big open fields with great GPS reception, but that’s a rabbit hole for another post.
So Pick the Biggest Blade Size, right?
Well, sort of. If you do much searching, you’ll find that the biggest blade you can get your hands on is about 21in. There’s a good reason for this: mowers cut best when the blade rotates at near-ballistic speeds, and if you make a blade much larger than 21in and then rotate it at 3600RPM, anything it hits turns into a piece of shrapnel. Not to mention what could happen if the blade itself shatters. Go look up some lawn mowing accident videos to see what I mean.
In my reading, I found that our friends at the American National Standards Institute (ANSI B71.1-1990) did some testing and recommended manufacturers keep the blade tip speed below 19,000ft/min, or 216mph. That’s linear velocity, not angular velocity. Remember that angular velocity is equal to linear velocity divided by the radius through which it rotates.
So How Fast Should We Spin the Blade?
So knowing that we want a big blade size and that we want to achieve a blade tip speed of just shy of 19,000ft/min, we can calculate the required angular velocity.
The maximum angular velocity of a 21in mower blade for compliance with ANSI B71.1-1990. Don’t forget the calculation between radians and revolutions.
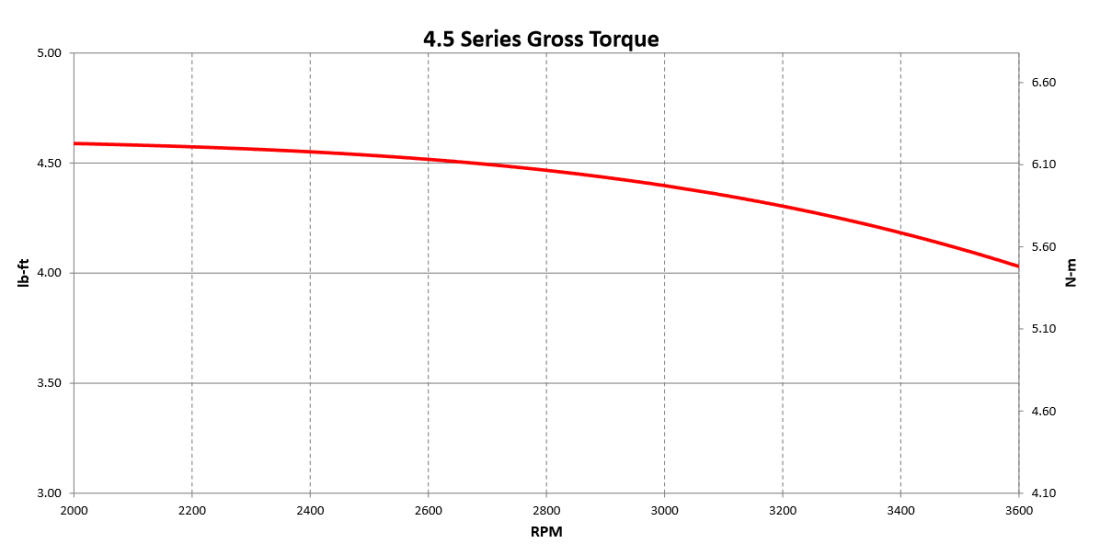
Knowing the angular velocity, we can now calculate the required power if we know the torque the mower blade will experience spinning through thick grass. Unfortunately, that’s a very difficult figure to arrive at. So instead of doing some convoluted math to estimate the torque to cut through grass, we’ll just take the gross torque ratings listed by the folks out at Briggs and Stratton, as their mowers generally cut through grass with no problem.
The gross torque versus RPM curve for a Briggs and Stratton 450e series engine.
This engine is one of their lower end models. Briggs and Stratton advertises gross torque at 2600RPM, so for this engine it would be 4.5ft-lbf of torque. If we take 5ft-lbf of torque as the required torque to cut through grass, we can estimate the power we’ll need for an angular velocity of 3450RPM.
The minimum power our motor needs to supply to keep a 21in blade spinning at 3450RPM.
Does the Craigslist Motor Cut It?
Electric motors aren’t like gasoline engines. Their torque to RPM curves are much simpler. With no load attached to the armature, the motor will spin very fast while outputting very little torque. If you apply a small load to the motor, the angular velocity will decrease slightly and torque will increase slightly. If you keep doing that until the motor stops turning, you’ll arrive at the stall torque. This is the maximum torque the motor can output.
So electric motor torque to RPM curves are linear. To draw them, you only need three pieces of information: the angular velocity and torque at a given point on the curve and the no load angular velocity. Using that information, you can draw a line for the torque curve.
The best information I could find for the motor I salvaged.
The table here indicates the no load speed is 4300RPM and gives an operating point of 0.96ft-lbf (1.3N-m) of torque at 3700RPM. From this information you can find the stall torque and the maximum power the motor can output.
The calculation for the stall torque (top) and maximum power (bottom). The maximum power for a brushed DC motor occurs at half the stall torque and half the no load speed. This is why those variables are divided by 4 in the Power calculation above.
The manufacturer says that the rated power for the motor is 500W, but from my calculations I’m not sure that’s true. However, I am very surprised that the calculated power is this low. It’s very possible I have no clue what I’m doing here with these calculations. If that is the case, please call me out on it.
A motor that gets even close to the power levels we need would have to be a 2500W motor. We have a 24V power system, and we need the motor to spin at 3600RPM minimum. Doing a brief web search for those terms doesn’t come up with many promising alternatives. I’m not sure motors with those parameters are practical or even exist, at least in the PMDC variety.
So What Have We Learned?
I can think of a few things:
If RTK GPS is our positioning technology, we’re going to want to make the mower as wide as we reasonably can.
To keep our mower safe, the blade tip speed needs to be no faster than 19,000ft/min.
Mower blades don’t come much larger than 21in long, so if we want a deck bigger than that we’ll be adding complexity to our design.
We’re going to need a boat load of power to spin that 21in blade at power levels generated by gasoline engines.
A permanent magnet DC motor may not be the way to go given these constraints.
I hope these musings about the mower make sense. I am always open to opinions and criticism about the evidence above, and what conclusions should be drawn from them.
I don’t think it’s a stretch to say that we are in a golden age for robotics. A lot of technology available in the realm of hobby robotics didn’t exist 10 years ago, or didn’t exist at a price that most hobbyists could afford.
Related, and just as important, is how much information is currently available. I’m a mechanical engineer by training, and so most electronics and programming is a challenge for me (part of why I’m doing this project is for me to learn those skills).
A lot of this information is available on the internet, and if it’s not, there’s usually a genius lurking on some website who has solved a very similar problem and is willing to lend a hand (if you ask nicely and do a minimum of homework before asking).
So before I get into the specifics of the Mower Project, I want to list several of the “Giants” whose shoulders I’m standing on. These are folks who have convinced me the Mower Project is possible, inspired me to do something that I know will be difficult, or have solved some epic technical challenges I foresee with the project.
Rusty Nails Workshop
Alligator over at the Rusty Nails Workshop developed something very similar to what I had in mind for the Mower Project back in 2014. The Mower Project was a pipe dream until I saw his blog post about his autonomous lawn mower.
His system uses Swift Navigation’s Piksi version 1, a Sabertooth 2X32 motor controller, and a laptop running a python program for automation as I understand it. He had a camera mounted on the robot for vision.
I think Alligator intended to implement vision based automation on it with that kind of setup. I’m not sure what happened to his project, but it looks like he wasn’t getting good results with the Piksi version 1 and decided to move the hardware over to an epic RC snow plow robot.
I personally think he jumped into making the mower portion of his design too soon. I would have spent more time perfecting the automation aspect before implementing the mower portion, but you can’t argue with his get ‘er done attitude. He accomplished more in one year than I have in four.
Unreasonable Rocket
Paul Breed is a mad scientist. I mean that in a good way. I’ve read his blog Unreasonable Rocket from start to finish, and what is most inspiring to me is how it seems like one day he just decided he wanted to build rockets. And so he did.
Paul basically wrote his own Arducopter code before Arducopter existed. He then went on to use that code to design an auto-stabilized rocket and placed 2nd in the 2009 X Prize competition.
Paul’s work doesn’t have much to do with the Mower Project, but seeing a guy basically build a hovering rocket from scratch blows my mind. When I get discouraged about the Mower Project, I go read some of Paul’s blog. He’s had rockets blow up on him during test runs. Compared to that, my little wiring issues are chump change.
Ardupilot
Speaking of Ardupilot, I would be remiss if I didn’t mention this awesome open source autopilot software. These guys have basically done the hard work of programming a quadcopter to fly autonomously.
I am very grateful for the folks that fly quadcopters and develop the Arducopter portion of their software, because a lot of awesome features get ported over to the Ardurover platform.
The combination of the Pixhawk flight controller and Ardurover is what I intend to use for the Mower Project. This hardware and software combination is used by guys that build things like autonomous tractors, vertical takeoff aircraft, and aerial mapping quadcopters.
Deep South Robotics
Robby over at Deep South Robotics is another genius I’ve come across in my research. He wrote an article about implementing an RTK GPS receiver a while back that received a lot of interest from folks like myself attempting to automate an AGV in a high multi-path environment.
Robby has a lot of good information about AGV construction best practices. He has done a great job highlighting some cool robotics solutions (like these Gore vents) that I was previously unaware of.
I’m not sure why he stopped posting to his blog, but I suspect some top secret government program made him an offer he couldn’t refuse to work on some next generation defense project.
There’s a picture of him on a large riding mower with his robotic platform installed over at his blog. I’m not sure he ever mentioned it on the blog, but I secretly think he is a lot further along than us mere mortals at making a truly autonomous mower.
The Missus
I’d also be remiss if I didn’t mention my wife who allows our office to be cluttered with random robot parts and allows me to use her for my rubber duck debugging conversations. Her support makes this project both fun and rewarding. I’m a tight-wad, and she has helped encourage me to spend a little money on the parts I needed to get the Mower Project rolling.
I expect this blog will serve as a place to document the Mower Project’s progress, and to motivate me to work on it. I’m hopeful it will also serve as a forum for folks working on similar projects to swap notes. Next time I’ll give an overview of the Mower Project and some of the hardware I’m using.