I’ve decided to change a few things on the robot mower design. I have a tendency to get hung up on really small things by spending way too much time thinking about them. The deck height adjustment was turning into one of those things.
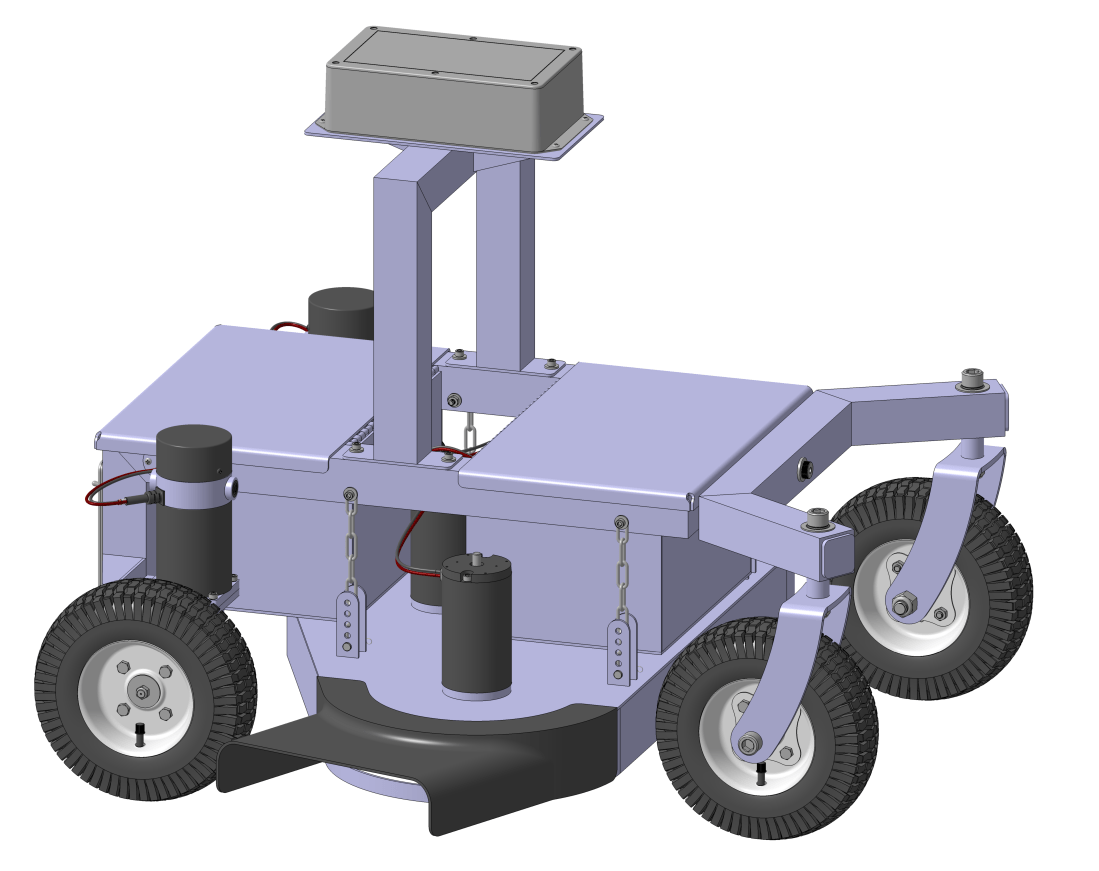
I’ve changed the design to include four simple clevis pins. They’re $0.50 a piece. You don’t need to adjust the deck height that often, and spending $100 on parts to do that in a fancy way is a waste of effort and money.
I modeled up a discharge chute because I think the mower will need one to look professional. I intended to 3D print it, but it turns out the dimensions are big enough that most hobby websites won’t take it. I know of a place nearby that does industrial 3D printing and they quoted me $290 for the part out of ABS. Yikes. Maybe I’ll try to adapt an off the shelf chute instead. That’ll be more reverse engineering but it will probably work better. And cost a few hundred less.

I’ve started modeling up some wires and coming up with a way to neatly connect the motors was more challenging than I thought it would be. I found some “wall mount” XT60 connectors that will hopefully will work well. I’ll have some mounting plates NC machined and then attach the XT60 wall mounts to the plate.
