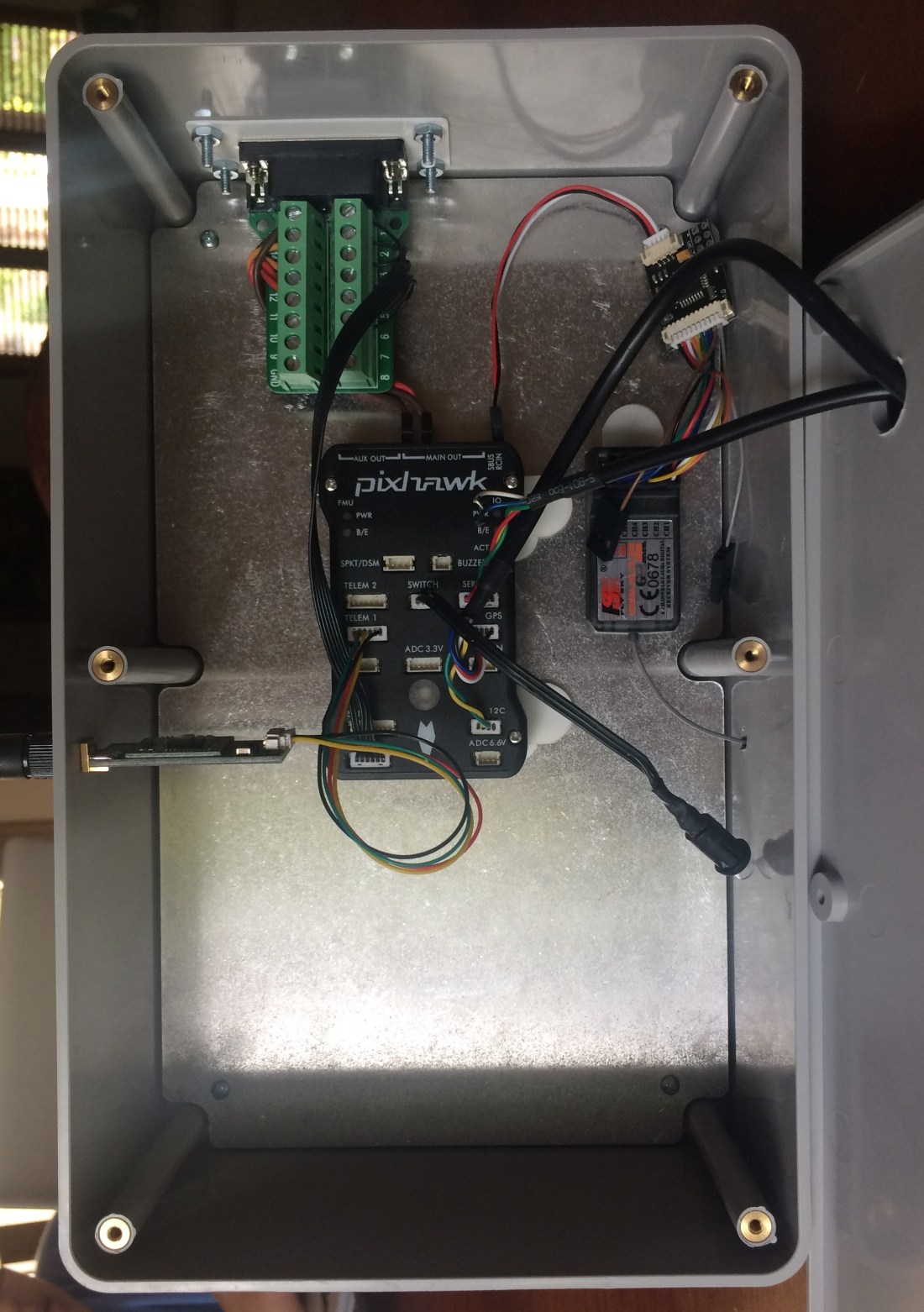
The control enclosure went together even faster than the power enclosure. I intended to use adhesive backed Velcro but had a handful of command strips laying around and decided to use those instead.
There weren’t any holes that had to be drilled in the metal plate inside the enclosure, so I pretty much eyeballed the location of everything, slapped a command strip down to place everything.
Ardupilot recently started supporting GPS blending and I had an old NEO 6M GPS receiver on hand and thought it would be worth trying out. I had to re-crimp the serial connector from a 4 pin DF13 to a 5 pin because the 6M was for an APM module I had purchased a while back. We’ll see how it turns out.

To mount the telemetry radio, I made sure to drill a hole in the thinner portion of the Polycase enclosure wall. These enclosures are injection molded (I think) and the walls are tapered so they can be removed from the mold easily. I mounted the radio by sandwiching the wall with the radio and antenna.
All that’s left is to put everything together on the wheel chair now.
