
Batteries are often advertised with a nominal voltage and nominal charge. It’s tempting to take those numbers at face value and assume that regardless of operating circumstances, a battery will sit at its nominal voltage and run until its nominal charge has been depleted. Reality is more complicated than that.
Christopher Milner reminded me of this in a brief conversation this week. He is using 13 3.2V, 100Ah LiFePo4 batteries in series to power the deck motor on his mowing rig. Stringing them together in series gets you close to 48V in their charged state. He reports getting about 3 hours of runtime while powering a motor that consumes 1300W.
This surprises me because my own calculations suggested four 12V, 35Ah lead acid batteries should be sufficient. Christopher obviously knows what he is doing and I trust his experimental results much more than I do my own back of the envelope calculations. The discrepancy means I need to reevaluate my numbers.
When making my calculations I did not take battery discharge rates into account. This is a big mistake, as I’ll show below. But first, for my own educational benefit, I’d like to introduce you to the C-rate, a way to quantify how fast you pull current out of a battery.
The C-Rate
What is a battery’s C-rate? Our good friends at Wikipedia define it as:
The C-rate is defined as the charge or discharge current divided by the battery’s capacity to store an electrical charge.
In layman’s terms, the C-rate is just the ratio of an arbitrary discharge rate to the battery’s charge capacity. It’s a simple way to describe how much current you’re demanding from a battery relative to the battery’s total stored charge. If you’ve got a battery rated for 10Ah and you discharge it at 5A, the C-rate would be:

It’s kind of a janky way of defining things in my opinion. A C is really an inverse hour, or stated differently, the unit of measure for a C-rate is h−1. Also, don’t confuse the C-rate with Coulombs, the unit of measure for charge. Clear as mud?
The reason I write all of this is so we’re all on the same page about what a C-rate is. If I’m wrong, please comment below, because I am going to proceed with this understanding of the C-rate going forward.
The C-rate is a useful measure because the total amount of charge you can extract from a battery depends on how fast you take it out. If you try to pull 100A out of a 10Ah battery, you’re not going to get nearly as much charge out of the battery as you would if you discharged it at 1A.
Additionally, when you demand a large amount of current from a battery, your voltage starts dropping fast. This is important because electrical power, which is ultimately what we’re after, is voltage times current. If your voltage drops you get less power, even if you’re withdrawing the same amount of current from the battery.
Your batteries are going to be much happier and live much longer if you stick with a reasonable C-rate. Having said all of that, how do the four 12V, 35Ah batteries I selected stack up against the expected current draw they’ll experience?
Our SLA Batteries Reevaluated
Previously I estimated the total current consumption of our robot at 197A. I think this is a conservative number, but I’m going to roll with it anyway. The number reflects current consumed by the three deck motors, two drive motors, and various electronics at their worst case scenarios.
I’m using two sets of two 12V, 35Ah batteries wired in parallel, then in series to get an equivalent battery that’s 24V, 70Ah. The discharge rate for one battery in this configuration is half the total current consumption because we have two sets of two batteries wired in parallel. This means that one battery is discharged at a rate of 98.5A.
The datasheet for one of these batteries shows the following chart, with various C-rates:
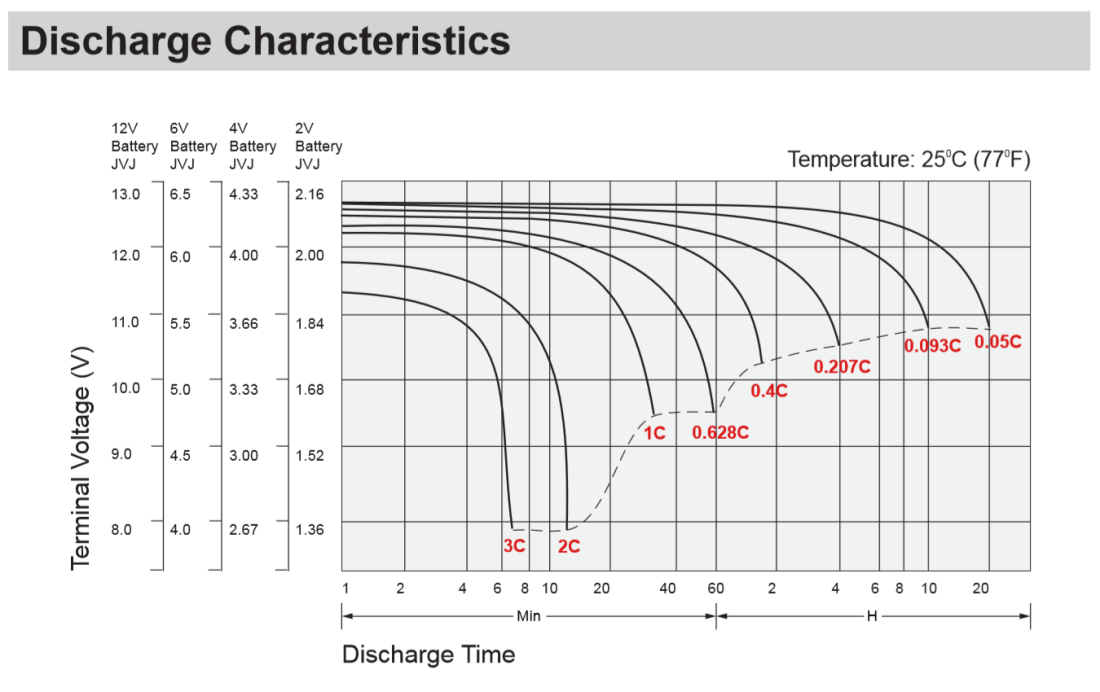
At a discharge rate of 98.5A, our C-rate is 2.81C. Looking at the chart above, that would mean our batteries will last for ~8 minutes. Yikes. And realistically, the 2.81C curve may extend to about 8 minutes, but the voltage drops off so fast after about 4 minutes that you’ll probably start noticing performance problems very quickly.
Also interesting to note from the chart above is that the one hour discharge rate is in fact not 35A as you’d expect with a 35Ah battery. It’s actually 0.628 times 35Ah, or 21.98Ah. To truly extract the 35Ah charge from the battery, you can only discharge it at a C-rate of 0.05C, or 1.75A.
Having written all of this, I wonder to myself why manufacturers don’t just list curves with specific discharge rates in Amps. The chart above would be completely unambiguous if they just showed a curve for 105A, 70A, 35A, 21.98A, etc. The conversion is tedious and honestly, if you don’t truly understand C-rates you leave with the impression that these SLA batteries are much more capable than they truly are.
Looks like we will need to use some lithium batteries after all. Thanks for saving me $400 on some batteries that wouldn’t have worked Christopher!

Hello,
I’m following your project with great interest as I’d like to build an automated mower, but I am only in the brainstorming phase. Your calculation of the power consumption and batteries required have got me thinking in a different direction, and I’m wondering if you’ve thought down this path before and have any insight.
When I look at existing automated mowers, such as the Husqvarna Automower, they all look to use very lightweight cutting discs rather than a conventional mower blade, and that allows the entire mower to be very lightweight and get high runtimes with a small battery. The downside of course is that such a lightweight cutting disc really only works best if it is out cutting the grass every day, but since it is automated perhaps that is just fine? The reviews are quite good on the Husqvarna, and this is leading me to think about perhaps trying to build something similar.
The largest Husqvarna Automower, the 450X, only uses 35W when cutting! I’m not sure how much is the cutting disc motor vs the wheels, but regardless, this is a tiny amount. They only have two 18V 10.4 Ah Li-Ion batteries in there which would be pretty cheap to buy. It is rated at a typical runtime of 270 minutes.
So, if I could build something like that it would be a lot cheaper to build as it would only require a small battery and small cutting motor.
I would consider just buying the Husqvarna cutting disc and blades and mounting those to a motor since that might be easier.
The main downside would be that it would take a lot longer to cut the lawn, as the cutting path on that unit is only 9.45″. But, what about a larger version where you have 3 cutting discs, similar to your design, to give a wider path? The whole unit would need to be bigger than the Husqvarna but the power budget could probably still be only around 100W.
Building one with these lower power cutting discs also makes me feel a little better about the liability issue than a conventional high powered mower blade.
Why wouldn’t I just buy a Husqvarna Automower? They all require running a perimeter wire, and I’d want it to use RTK GPS instead of doing that. Also they seem really expensive for what you get when you actually break down the components. The random path it takes also seems really inefficient. I saw some study where they put a RTK GPS on one and found that it was actually only around 35% efficient because of all the areas it cut twice. RTK GPS guidance would allow it to spend a lot less time cutting the same area.
Anyway, do you have any thoughts about going this route with a smaller/lower powered mower? Perhaps I’m missing something important. Thanks!
LikeLike
Hi Nick,
I think everything you’ve described will work just fine! It sounds like we’re approaching the problem with two different sets of objectives and perceived constraints. I’m attempting to make a mower with similar capability to many of the smaller gas-powered riding mowers on the market today. It sounds like you are okay with something a little bit smaller and slower, especially if it’s safer and cheaper. Personally, I think that is an acceptable tradeoff.
The mower I’m making will have a 36in wide deck and will travel at about 2mph. If you do the math, that means my mower can cut 0.73 acres per hour. I’m not sure how fast the Roomba mowers run, but the ones I’ve seen aren’t fast. With a 9.5in wide cutting path and half the speed of my mower, you’re only able to cut 0.10 acres per hour. Or put differently, it would take my mower 110 minutes to mow a football field while a Roomba style mower would take more than 13 hours. And that assumes you’ve planned the paths such that they don’t travel over areas that have been already cut.
The math above is what pushed me toward the design I’ve been posting about. Again, neither design is inherently better, they’re just tailored toward a different set of objectives. Your mower design is probably better at mowing a residential lawn, while mine would do better at mowing large fields.
One comment about the RTK GPS that I would make though is that your positioning accuracy will always have some error in it, usually around +/-1in if you get a good RTK fix. That being the case, your mower can be to the left of where it’s supposed to be by 1in, or to the right by 1in. If you’re making alternating back and forth passes, you need to overlap them by some amount greater than that total variance of 2in to make sure you don’t miss any grass when you make your passes.
Because your positioning error is what it is, the smaller your mower’s cutting width, the less efficient it will be when making passes. Say you plan your paths to overlap by 3in to make sure you cut all the grass. With a 9.5in wide cutting path, you could be mowing up to 3in of grass you’ve already cut. Your mower could be as inefficient as 3in/9.5in = 32%. The wider your mower deck, the more efficient your cut paths will be for a given positioning error. A 36in deck, for example, would only be 3in/36in = 9% inefficient. This is why RTK GPS works wonders in agriculture, when your implement is 20ft long, 3in is chump change.
It sounds like RTK GPS could improve the random mowing algorithm by a lot. It may not allow you to plan predefined paths, but it should give you better resolution about where you’ve been cutting and where you haven’t been cutting. It might also be able to double as a fence, too. I wonder how well these mowers do at trimming along the edge of the lawn where the perimeter wire is. Conceivably they could just follow the wire to cut the edges.
Regarding the blades, I wonder if there is a limit to how fast the Roomba mowers can travel and still acceptably cut the grass. Running the whole mower at slower speeds makes the whole system much more efficient from a power perspective, but the tradeoff is obviously time. If this mower will take care of one single lawn during the summertime, that’s probably okay.
I hope that answers your question. Bottom line is that using smaller motors with the disc blades lets you save a lot of power and frees you from needing some hefty Lithium batteries like I’m probably going to end up using.
LikeLike
Thanks for the reply. Your thoughts are similar to what I’ve been thinking about. There are always trade offs. I’m not planning on building anything anytime soon, but just brainstorming at this point, so I will continue following your progress with interest!
LikeLike